Autonomy Stack for quadruped - Addverb
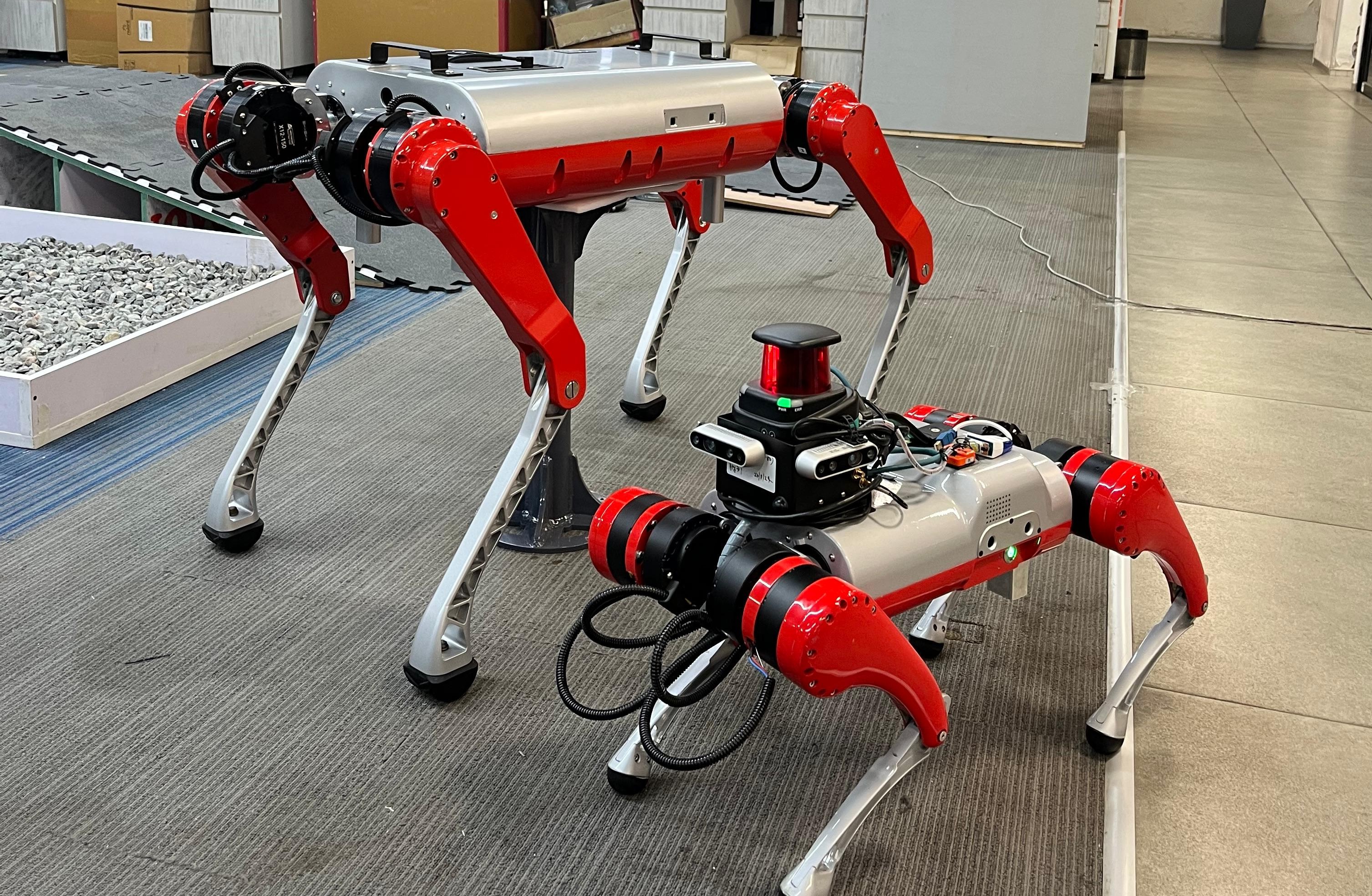
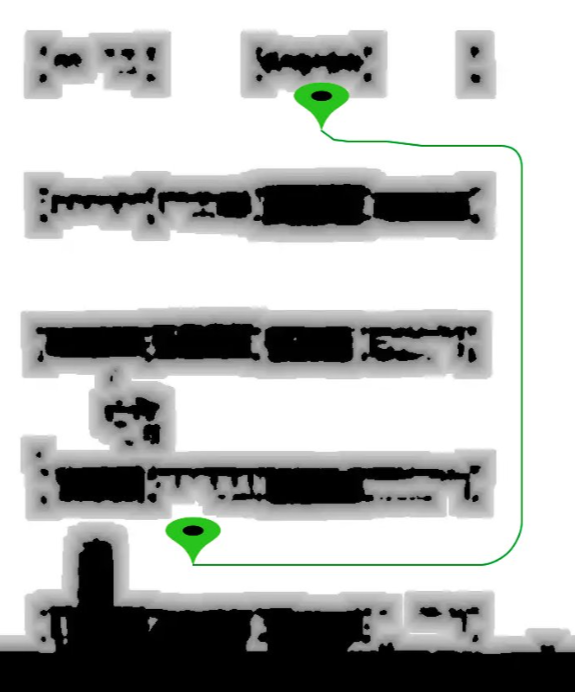
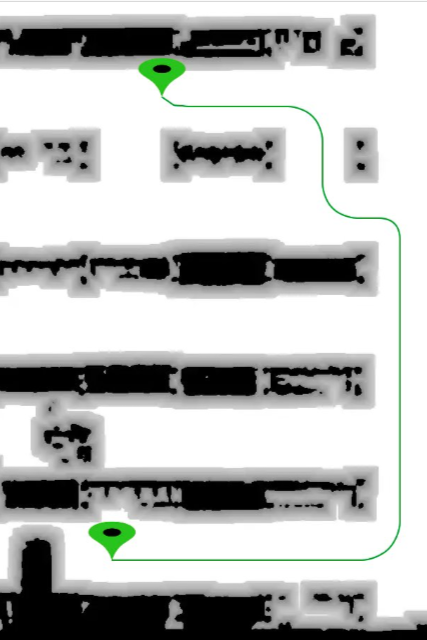
Developed the autonomy stack—including SLAM and navigation—for Addverb’s in-house quadruped, TRAKR, enabling efficient navigation in unknown environments with minimal human intervention.
C++
Graph Optimization
Bundle Adjustment
Loop Closure
Sensor Fusion
Hybrid A*
Pure Pursuit Controller
Design Pattern
OpenCV